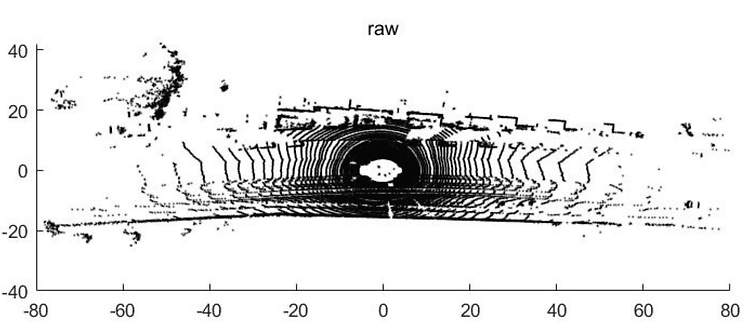
Concept 지난 포스팅에 이은 라이다 데이터 전처리 기법 #2, PCD Segmentation 알고리즘입니다. 일반적인 라이다는 360도 전 구간에서 데이터를 수집합니다. 모든 데이터가 필요하기도 하지만, 측면이나 후면에 부착된 도로 주행 분석 시스템에서는 불필요 데이터를 제거해야 합니다. 이를 위해 방사되는 각도에 따른 분할 알고리즘을 구현해보도록 하겠습니다. POST 1.라이다 데이터 전처리 [KITTI DATASET 활용하기] 2. 각도에 따라 라이다 데이터 분할하기 [Segmentation] 3. 변환 행렬을 이용하여 라이다 데이터 축 변환하기 [Transformation] 4. 복셀화를 이용한 LIDAR 라이다 PCD 데이터 압축 [Voxcelization] Algorithm (Polar C..